Consulenze specializzate di robotica e IoT
Offriamo consulenze nei seguenti settori della robotica.

Robotica Mobile
Esempi di applicazioni robotiche sono: monitoraggio termico, magazzini, videosorveglianza, movimentazione merci, agricoltura. Navigazione autonoma, visuale, ricostruzione 3D,path planning, mapping e localizzazione
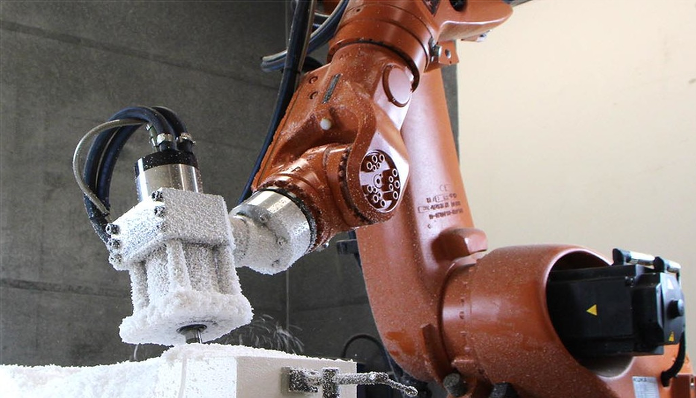
Manipolatori
Sviluppo software ed integrazione di manipolatori low cost per produzione in piccola serie es. robot da saldatura, pick and place , robotica collaborativa

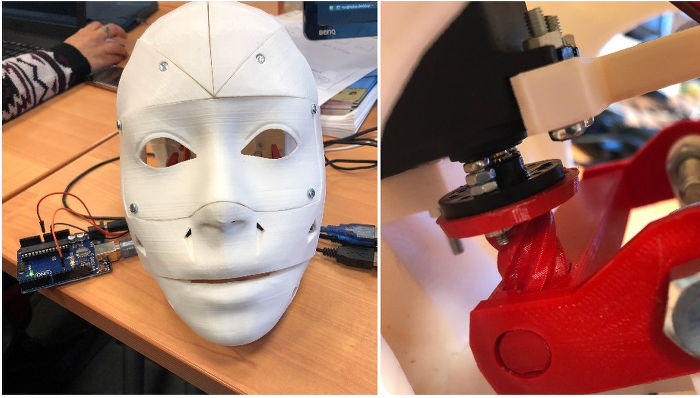
Robotica umanoide
Sviluppo software, stampa 3D ed integrazione hardware per robotica umanoide e riabilitativa es. protesti, robotica riabilitativa, show robotici, entertainment ed education
Sviluppo software
Sviluppo in ROS Robotic Operating System, machine learning, visione artificiale, linux embedded, RTOS
Portfolio
La selezione dei migliori progetti svolti fino ad ora.

e.DO COMAU
e.DO è un braccio robotico COMAU che sfrutta ROS Robot Operating System, il sistema operativo più usato nella robotica di servizio, e Raspberry Pi.
Più info qui.
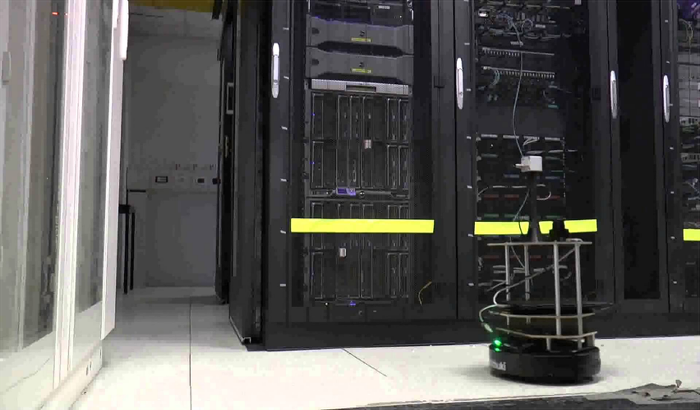
Robotica mobile
Monitoraggio robotico per TIM e Politecnico di Torino. Il sistema completamente autonomo permette il monitoraggio termico e la valutazione dell’efficienza energetica in modo flessibile e puntuale.

Parloma
Sviluppo hardware e software di robotica umanoide per il progetto Parloma, “un telefono per sordociechi”.
Show robotico
Sviluppo software e hardware di un robot da spettacolo commissionato dall'Ordine degli Ingegneri di Torino.
La nostra tecnologia
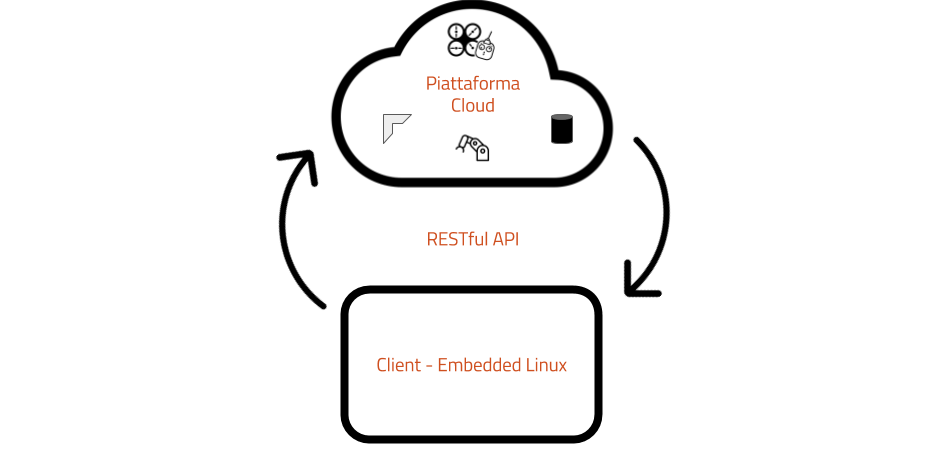
L'architettura IoT che usiamo nei progetti di robotica è riassunta come in figura sotto:
- Piattaforma cloud. Lato server c'è un'infrastruttura cloud per la gestione dei robot e/o dispositivi IoT, database dei dati (log,status, ecc...)
- Robot o dispositivi IoT. Lato client (microcontrollori o embedded linux) traduciamo i comandi da piattaforma cloud ai dispositivi IoT e/o robot.
- API REST. La comunicazione tra client e server avviene tramite RESTful APIs già configurate da noi o che customizziamo ad hoc per l'applicazione.
Ovviamente non sempre è richiesta tutta l'infrastruttura cloud in ogni applicazione robotica e non c'è quasi mai uno streaming continuo di dati tra piattaforma cloud e robot. L'architettura cloud è frutto della nostra esperienza nel campo della robotica/IoT ed è uno strumento efficiente per velocizzare lo sviluppo di applicazioni robotiche/IoT.
Più info qui.