HB Cloud Tutorial #1 - Uso dei Led
Pubblicato il
Ludus Russo
Un maker, un robotico, un Roker!
Ciao a tutti, iniziamo oggi questa serie di tutorial per insegnare a programmare i robot DotBot-ROS dalla piattaforma di cloud robotics che stiamo sviluppando: HB Cloud.
Questo primo tutorial è dedicato all’accensione e allo spegnimento del Led, e si basa sulla versione beta del sistema operativo HBrain (v0.3.2). Scrivo questo tutorial in preparazione al percorso di alternanza scuola lavoro con l’ITIS Avogadro di Torino. Se qualcuno volesse però provare per conto proprio ad utilizzare la piattaforma ci contatti in privato per ricevere supporto.
Cos’è HB Cloud?
HB Cloud è una piattaforma di cloud robotics che stiamo sviluppando in HB Robotics. Lo scopo è quello di permettere a makers, studenti e non professionisti di imparare in modo semplice l’utilizzo di tecnologie innovative nel mondo della Cloud Robotics, ed in particolare su ROS.
Il nostro scopo è quello di semplificare lo sviluppo e la gestione di applicazioni robotiche! HB Cloud si interfaccia automaticamente con HBrain, un sistema operativo da noi sviluppato per Raspberry Pi che include il framework ROS (Robot Operating System).
Scriviamo il primo codice per accendere un LED
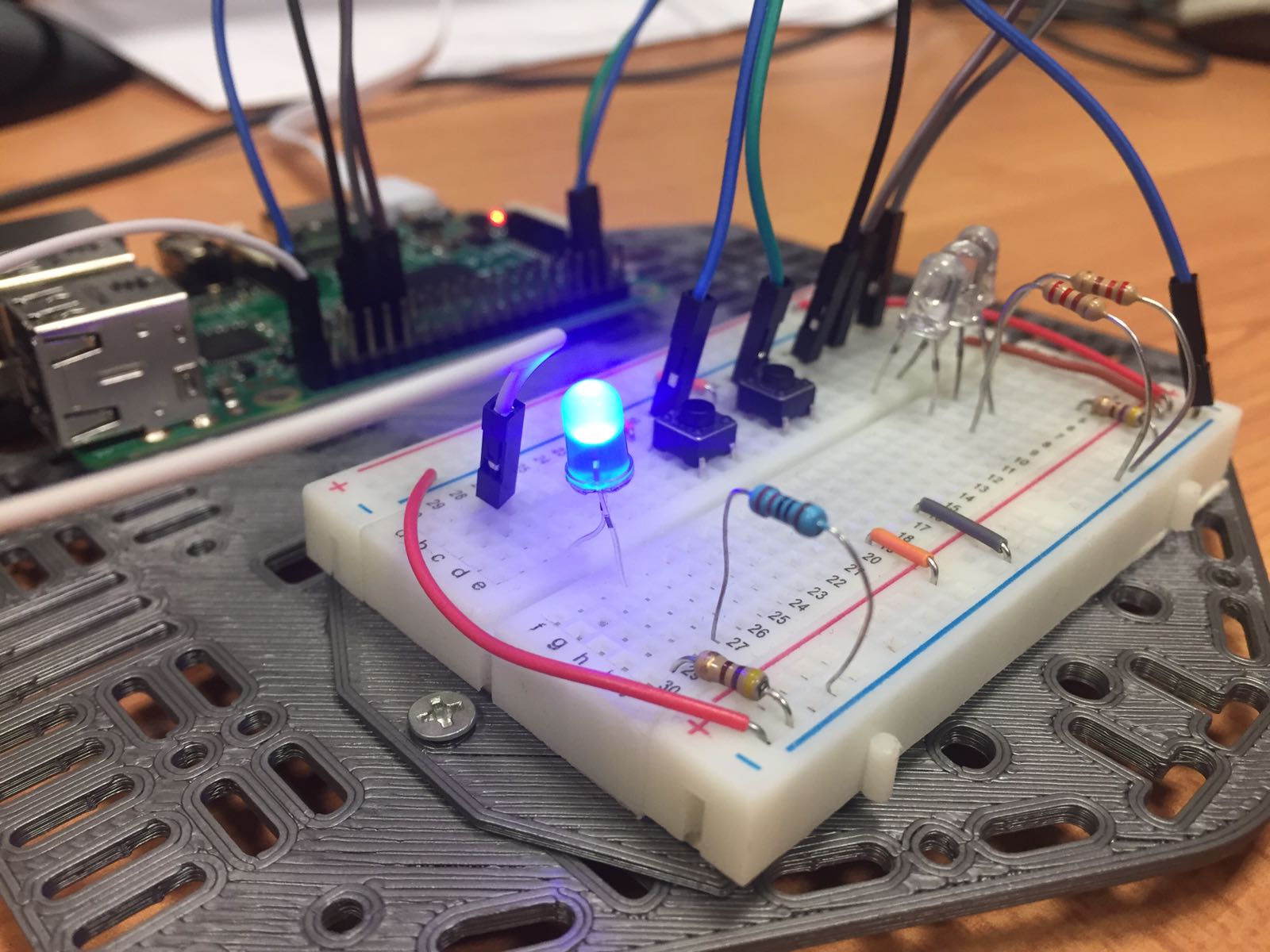
Circuito Elettrico
Il codice python per la gestione di un led è molto semplice, ma prima di tutto è importante sviluppare il circuito. Colleghiamo l’anodo del Led al Pin GPIO05 del Raspberry Pi. Colleghiamo il catodo ad uno degli estremi di una resistenza da 220Ohm, e mettiamo il secondo estremo della resistenza a massa.
Codice
A questo punto, siamo pronti a scrivere un semplice programma per far blinkare il led, cioè per farlo accendere e spegnere in modo continuato ad una frequenza fissa. Adremo ad utilizzare le librerie python gpiozero e dotbot_ros.
- gpiozero è una libreria che permette la gestione dei pin GPIO del Raspberry Pi
- dotbot_ros è una versione semplificata di ROS appositamente sviluppata per l’applicazione.
Scheletro dell’applicazione
Lo scheletro dell’applicazione che andremo a sviluppare ha la seguente forma
import dotbot_ros
class Node(dotbot_ros.DotbotNode):
node_name = 'blink'
def setup(self):
pass
def loop(self):
pass
Come per arduino, dovremmo implementare due funzioni:
- la funzione
setup, che viene chiamata una volta all’inizio del programma. - la funzione
loop, che viene chiamata in modo iterativo fino allo stop forzato del programma.
Bisogna inoltre settare la variabile di classe node_name, che rappresenta il nome del nodo che abbiamo sviluppato in ROS. In questo caso, il nostro nodo si chiamerà blink.
Nota Bene: In Python, la direttiva pass significa letteralmente non fare niente.
Configurazione della frequenza di Iterazione
Utilizzando dotbot_ros, possiamo decidere in modo semplice a che frequenza far iterare la funzione loop. In altre parole, se settimano la frequenza di iterazione a (per esempio) 10Hz, loop verrà chiamata 10 volte al secondo.
Per farlo, bisogna settare una variabile chiamata self.loop_rate all’interno della funzione setup. Se questa variabile non viene settata, la funzione loop non verrà mai chiamata.
Implementiamo quindi la funzione setup in modo da settare self.loop_rate a 2Hz
def setup(self):
self.loop_rate = dotbot_ros.Rate(2)
Perfetto, adesso siamo certi che la funzione loop verrà chiamata 2 volte al secondo!
Importiamo l’oggetto LED la libreria gpiozero
Possiamo ora iniziare ad usare la libreria gpiozero ed in particolare l’oggetto LED. Per farlo, prima di tutto, importiamolo con la seguente linea di codice
from gpiozero import LED
A questo punto siamo pronti ad inizializzare un oggetto di tipi LED. Ricordo che abbiamo collegato il nostro led al pin GPIO05. Nella funzione setup dovremo quindi creare un nuovo oggetto self.led associato al PIN numero 5
def setup(self):
self.loop_rate = dotbot_ros.Rate(2)
self.led = LED(5)
Come vedete, il tutto è molto semplice. Si noti che ho “appeso” l’oggetto appena creato (led) alla variabile self. In questo modo posso utilizzarlo all’interno delle altre funzioni della nostra classe Node, ed in particolare all’interno della funzione loop.
Blink del Led
A questo punto non ci resta che far blinkare il led. Per farlo dobbiamo implementare un codice che faccia sì che il led si spenga se è acceso e viceversa ogni volta che la funzione loop viene chiamata. Per farlo, gpiozero mette a disposizione un utilissimo metodo di LED chiamata LED.toggle(), che non fa altro che fargli cambiare stato.
Implementiamo la funzione loop, quindi, come segue
def loop(self):
self.led.toggle()
Codice completo
Ecco il codice appena sviluppato
import dotbot_ros
from gpiozero import LED
class Node(dotbot_ros.DotbotNode):
node_name = 'blink'
def setup(self):
self.led = LED(5)
self.loop_rate = dotbot_ros.Rate(2)
def loop(self):
self.led.toggle()
Ludus Russo
Un maker, un robotico, un Roker!