Laboratori ROS LADISPE Politecnico di Torino
Pubblicato il
Ludus Russo
Un maker, un robotico, un Roker!
In questi giorni, ho scoperto (e la cosa mi ha fatto molto piacere), che dentro il poli gli studenti iniziano a sentire la necessità di conoscere un po’ il mondo di ROS e della robotica, in modalità più pratica e non solo teorica.
Così, in po’ per caso, e grazie all’aiuto del buon Luigi Spagnolo, abbiamo deciso di far partire degli incontri non strutturati in cui diamo la possibilità agli studenti interessati ad approfondire questo tema e smanettare con ROS, Raspberry Pi e Arduino per costruire un proprio robot personale.
La modalità dei laboratori sarà libera e non direttamente supervisionata. Agli studenti sarà data la possibilità di accedere ad orari prestabiliti al laboratorio LADISPE del Politecnico di Torino e di avere a disposizione del materia per lavorare.
La mia idea, un po’ ambiziosa ma fattibile, è di metterli nella condizione di progettare e costruire un piccolo robot stampato in 3D e basato su ROS su Raspberry Pi 3 per il controllo ad alto livello e Arduino per il controllo a basso livello di sensori e attuatori.
In questa pagina, ed in quella del LADISPE, verranno pubblicati periodicamente dei tutorial e guide per apprendere il funzionamento di ROS e di queste tecnologie, per guidare passo passo i ragazzi verso la progettazione del proprio robot.
Materiale
Il materiale sarà fornito da noi durante le ore dedicate ai laboratori. Abbiamo a disposizione una serie di Raspberry Pi 3 Model B e schede Arduino su cui iniziare a fare i primi esperimenti.
Stiamo pensando di attrezzare il laboratorio con una stampante 3D.
Alcune informazioni su ROS
Prima di iniziare il tutorial, vorrei fare alcuni chiarimenti su cosa è (e cosa non è) ROS e su quali sono le sue finalità.
Nonostante il nome (Robot Operating System) ROS è un framework per lo sviluppo di applicazioni robotiche. È nato nel 2007 sulla necessità di evitare che ogni laboratorio di ricerca sulla robotica di servizio dovesse costruirsi il proprio set di funzioni base su cui poi costruire le proprie applicazioni. È stato quindi rilasciato con licenza OpenSource ed è completamente aperto e modificabile.
Data la grossa necessità a cui questo rispondeva, è stato adottato in modo massiccio in pochi anni da quasi la totalità dei centri di ricerca (pubblici e privati) sulla Robotica nel mondo, tanto che al momento è considerato uno standard di fatto per la prototipazione e lo sviluppo di applicazioni robotiche di servizio.
ROS è stato sviluppato in modo da essere fortemente estendibile, dando la possibilità ai vari laboratori di ricerca di contribuire rilasciando il loro codice all’interno di pacchetti ROS. In questo modo, all’interno di ROS è facile trovare tutti gli algoritmi allo stato dell’arte per abilitare il robot a risolvere compiti complessi e standard (come la navigazione autonoma), rendendo molto più semplice concentrarsi sull’applicazioni ad alto livello e non sui problemi matematici.
Ovviamente ROS ha anche alcuni problemi, i principali sono, a mio avviso, i seguenti:
- ROS nasce 10 anni fa avendo come obiettivo principalmente i laboratori di ricerca, un use case che al tempo prevedeva un robot, un server su cui fare le computazioni più pesanti e una connessione locale tra il robot e il server. Ovviamente, questo caso d’uso è superato e la ricerca è andata avanti verso tecnologie più evolute, come la Cloud Robotics o la Collaborazione Multi robot. In questi casi, ROS pone grosse limitazioni architetturali. Molti progetti (RoCon, Rapyuta) cercano di mettere una pezza a questi limiti di ROS, ma si sta anche cercando di riprogettarlo dalle fondamenta per risolvere questi problemi.
- Alcune decisioni dei programmatori iniziali sono contemporaneamente il punto forte e il punto debole del progetto. Ad esempio, la scelta di mantenere lo standard di scambio messaggi il più generico possibile rispetto all’hardware, da una parte fa si che gli stessi algoritmi vadano bene per robot con forme e caratteristiche diverse (un robot umanoide uno su ruote e un quadricottero, in ROS, sono controllabili nello stesso modo). Dall’altro crea un grosso overhead nella dimensione dei messaggi.
- La curva di apprendimento di ROS è bella tosta, specialmente all’inizio (ve ne accorgerete se seguirete queste guide).
Primo Incontro
Lo scopo del primo incontro è dare ai partecipanti la possibilità di prendere confidenza con le basi di ROS e con Linux, sistema operativo su cui ROS è stato costruito e mantenuto.
Set Up Raspberry Pi 3
- Scaricare l’immagine di Ubuntu Mate 16.04.
- Copiare l’SD del Raspberry utilizzando i vari tool disponibili online (noi consigliamo Etcher)
- Impostare un nome utente e una password e configurare il SO
- Installare Installazione ROS Kinetic
Set Up Ubuntu o Macchina virtuale
- Installare Ubuntu 16.04 (si faccia attenzione alla versione) sul proprio computer o su macchina virtuale con VirtualBox
- configurare il SO
- Installare Installazione ROS Kinetic
Cosa fare
Avete a disposizione un Raspberry Pi 3 model B con sopra installato ROS Kinetic.
- username: ros
- password: ros
Il primo laboratorio consiste nell’iniziare a prendere confidenza con il sistema publishing subscribing di ROS seguendo le seguenti guide:
- Navigating the ROS Filesystem
- Understanding ROS Nodes
- Understanding ROS Topics
- Installing and Configuring Your ROS Environment
- Writing a Simple Publisher and Subscriber (Python)
Alla fine dei tutorial, provare a scrivere un semplice nodo publisher che fa muovere la turtlesim.
Secondo Incontro: 12/02/2018, ore 14:30
Scopo del laboratorio: Configurare ROS con Arduino e ROSSerial per controllare sensori e attuatori.
Avrete a disposizione degli Arduino UNO (o simili) da interfacciare con il vostro Raspberry Pi, insieme a vari sensori ed attuatori forniti dal laboratorio.
Il vostro scopo sarà quello di interfacciare Arduino con ROS tramite il pacchetto ROSSerial. Il laboratorio sarà alla base per la costruzione dei vostri robot, la cui architettura è solitamente basata su Arduino Slave per il controllo a basso livello di motori e sensori e Raspberry Pi con ROS da master che gestisce l’intelligenza.
Breve tutorial di installazione
Installare rosserial-python e rosserial-arduino`
sudo apt-get install ros-<DISTRO>-rosserial-python ros-<DISTRO>-rosserial-arduino
Generare le librerie da importare in Arduino IDE
rusrun rosserial_arduino make_libraries.py .
Questo creerà una cartella ros_lib/ nella cartella attuale.
Lanciare Rosserial
rusrun rosserial_python serial_node.py <PORTA SERIALE>
Le porte seriali si possono scoprire digitando su shell
ls /dev/tty*
Il nome della porta potrebbe essere /dev/USB0 o /dev/ttyACM0 in base al tipo di Arduino!
Materiale
- Pacchetto ROSSerial
- Tutorial ROSSerial Arduino
- Arduino (cercate su google le vostre idee, ci sono un’infinità di informazioni)!
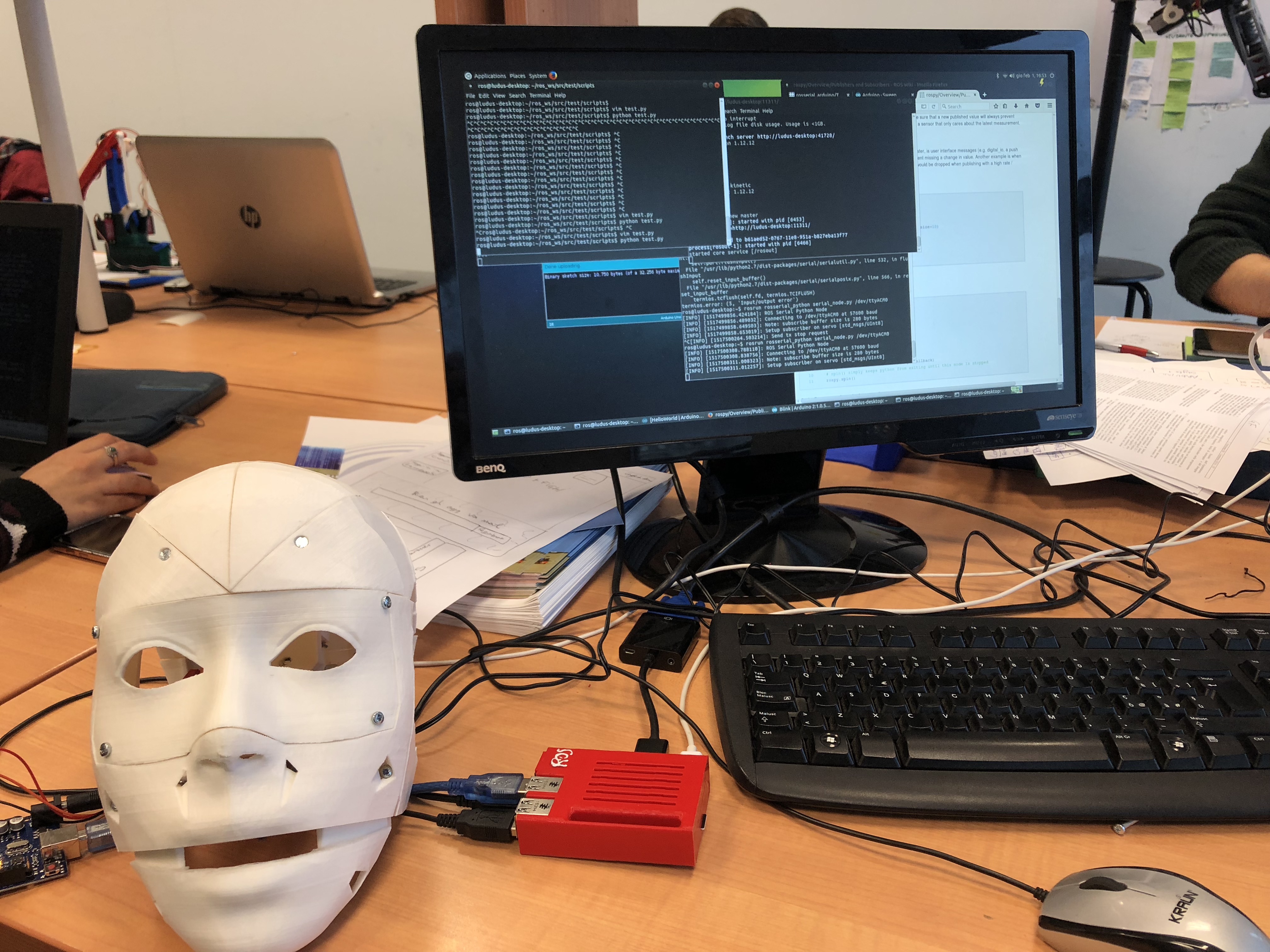
Esempio: Controllare la bocca del robot InMoov Tramite ROS
Vediamo brevemente come controllare la bocca del Robot InMoov.
Recentemente abbiamo sviluppato una testa InMoov in grado di muovere la bocca. Il funzionamento è molto semplice: un servo motore controlla la mandibola tramite un’accoppiamento vite-madrevite.
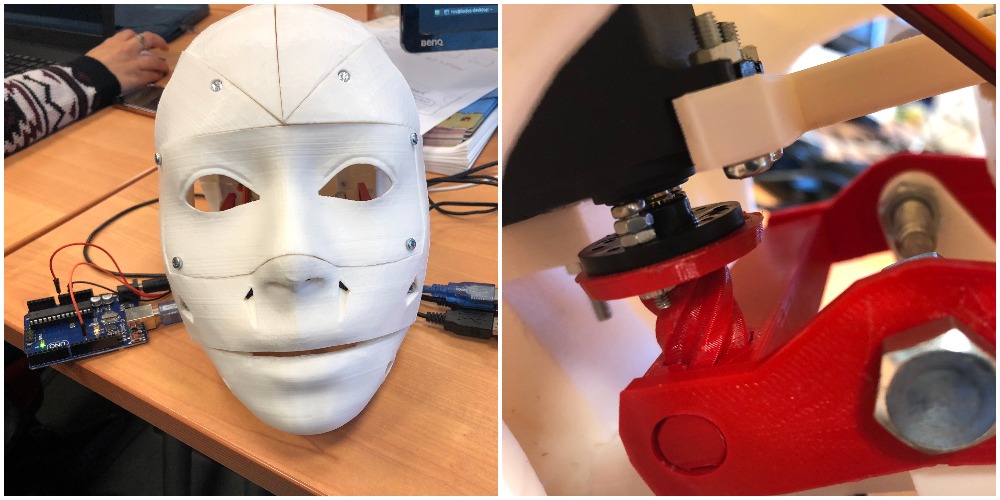
Il servo motore è controllato tramite un Arduino sul PIN 11.
Per interfacciarlo con ROS, creiamo un semplice topic /servo, di tipo std_msgs/UInt8 a cui Arduino si sottoscrive. Su questo topic, verranno mandato la posizione che il servomotore deve raggiungere.
Ecco il codice Arudino che ho implementato:
#include <ros.h>
#include <std_msgs/UInt8.h>
#include <Servo.h>
ros::NodeHandle nh;
Servo servo_inmoov;
void servoCb( const std_msgs::UInt8& msg){
servo_inmoov.write(msg.data); // blink the led
}
ros::Subscriber<std_msgs::UInt8> sub("servo", &servoCb);
void setup()
{
servo_inmoov.attach(11);
nh.initNode();
nh.subscribe(sub);
}
void loop()
{
nh.spinOnce();
delay(1);
}
Ho quindi scritto un semplicissimo nodo ROS che pubblica i comandi sul topic /servo per far aprire e chiudere la bocca al robot.
import rospy
from std_msgs.msg import UInt8
pub = rospy.Publisher('servo', UInt8, queue_size=10)
rospy.init_node('node_name')
r = rospy.Rate(50)
while not rospy.is_shutdown():
for i in range(50, 160):
pub.publish(i)
r.sleep()
for i in range(160, 50, -1):
pub.publish(i)
r.sleep()
Questo è il risutato :D

Dove trovare informazioni
- Gruppo Telegram Robot Secret Lab
- Gruppo Facebook Robot Developers Italiani
Ludus Russo
Un maker, un robotico, un Roker!