Utilizzare la RaspiCam in streaming con la piattaforma Cloud
Pubblicato il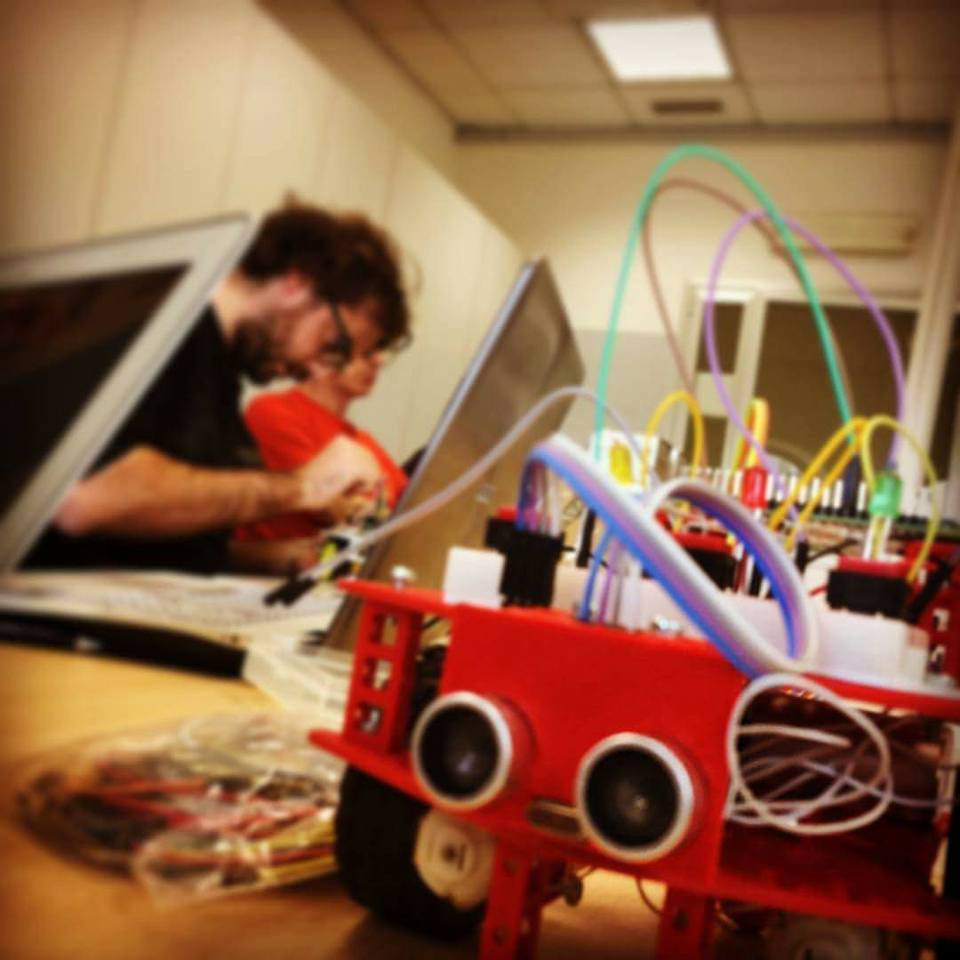
Ludus Russo
Un maker, un robotico, un Roker!
In questo tutorial, vedremo molto brevemente come utilizzare la raspicam tramite il robot dotbot e fare streaming dell’immagine tramite ROS e la piattaforma cloud.
Questa funzione è ancora in stato di test, quindi qualcosa potrebbe non funzionare. Nel caso, contattateci a info@hotblackrobotics.com.
Connettere la RaspiCam
Per prima cosa, è impostante connettere la raspicam al DotBot. Essa deve essere connessa sull’adatattore del raspberry recante la scritta camera, con il Raspberry Pi spento, come mostrato in foto
State attenti a posizionare la linguetta colorata orientata verso le USB!
Gestore RapiCam
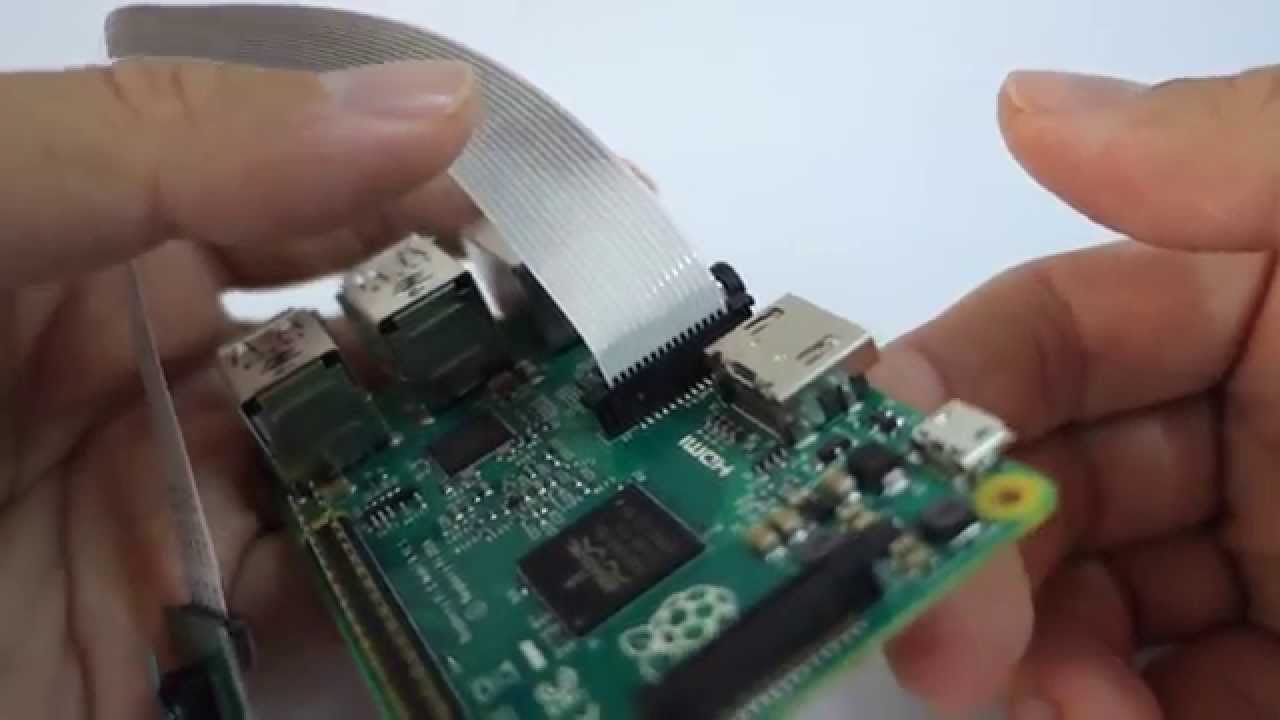
Il driver ROS che gestisce la camera è normalmente disabilitato. Per abilitarlo, per prima cosa bisogna connettersi al robot ramite piattaforma.
Quindi accedere al tab APPS > Raspicam
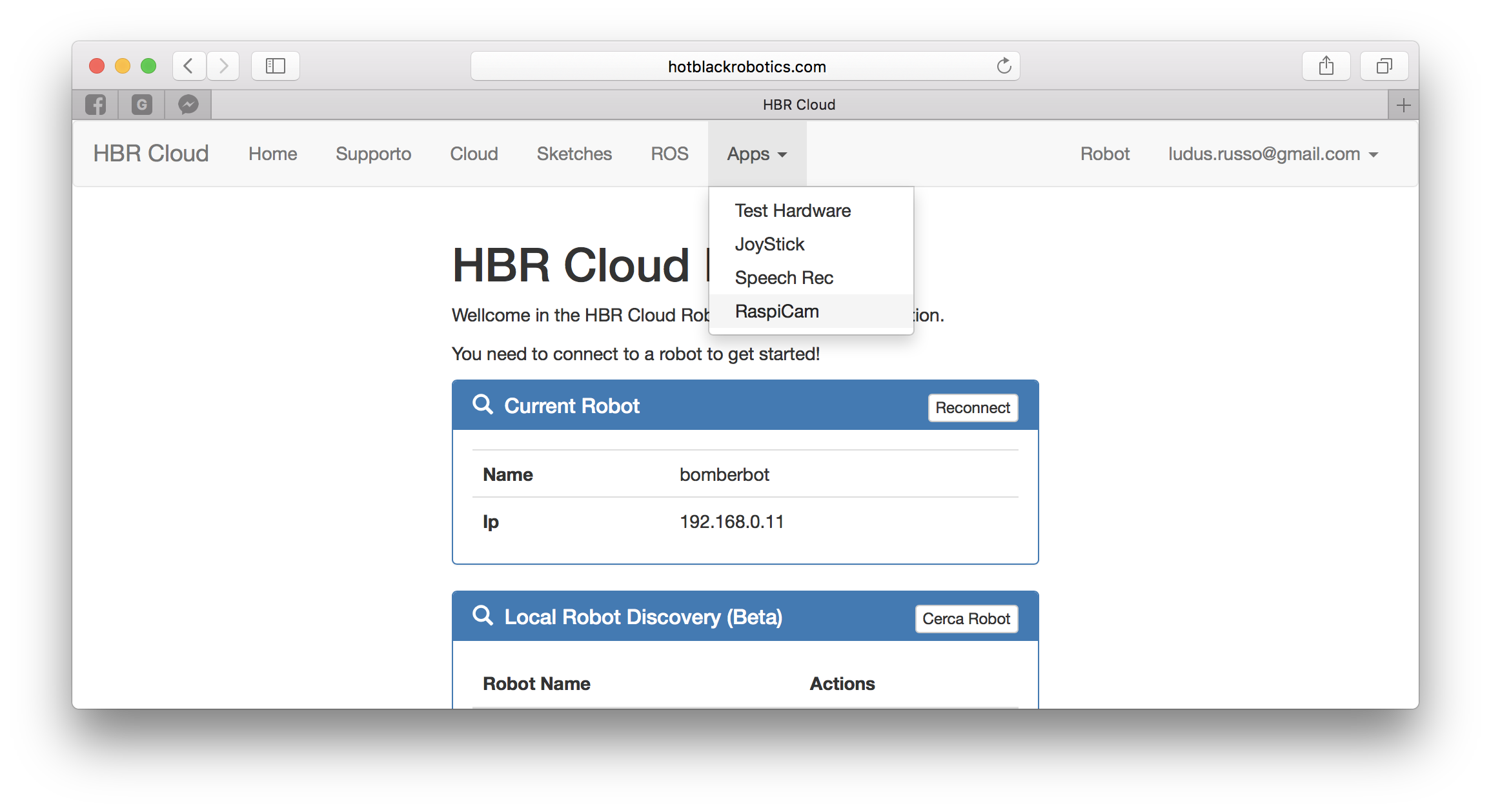
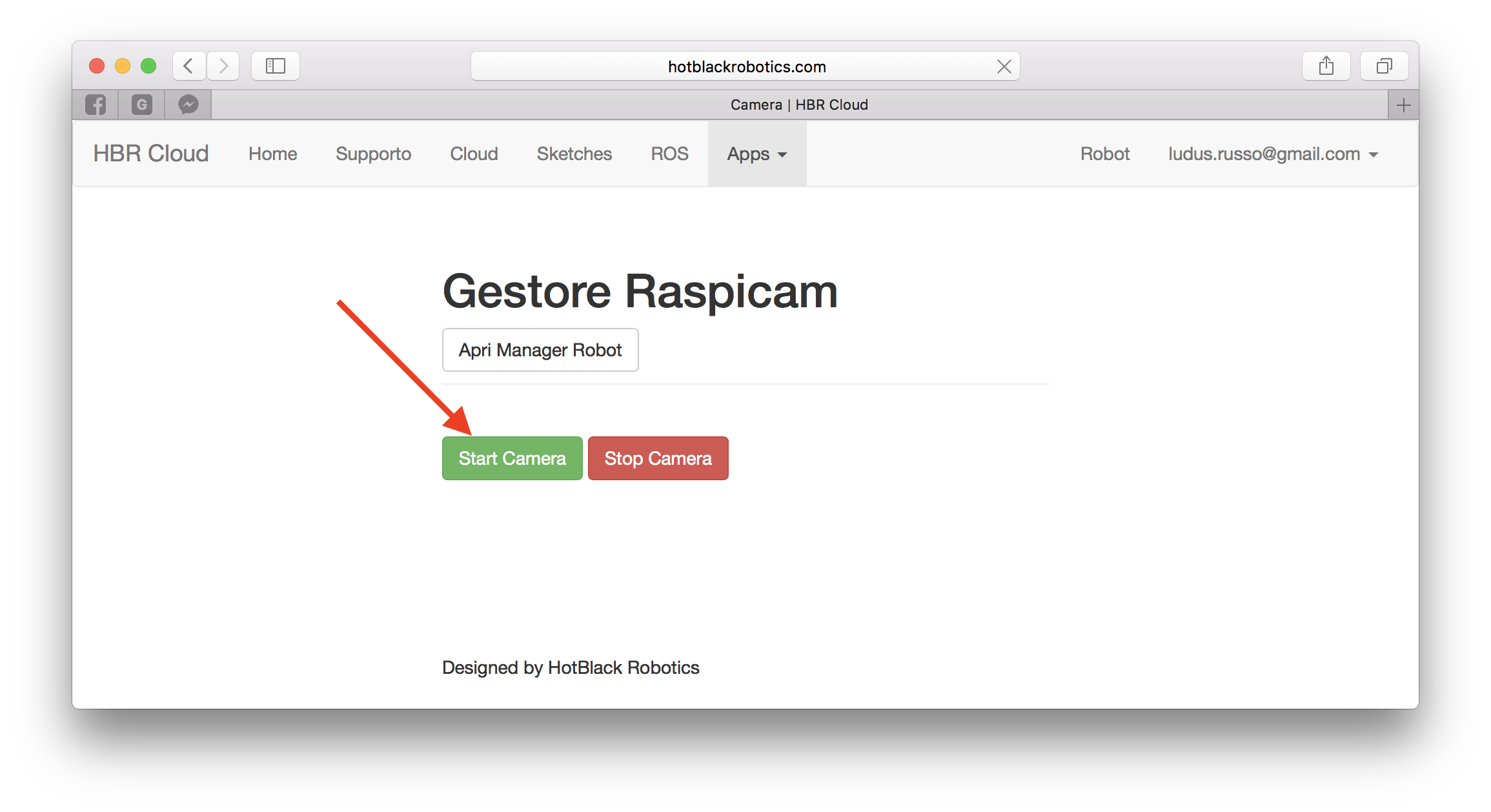
E finalmente saremo entrati nella nostra pagina di gestione, che avrà questa forma:

Abilitare il Nodo ROS-CAMERA
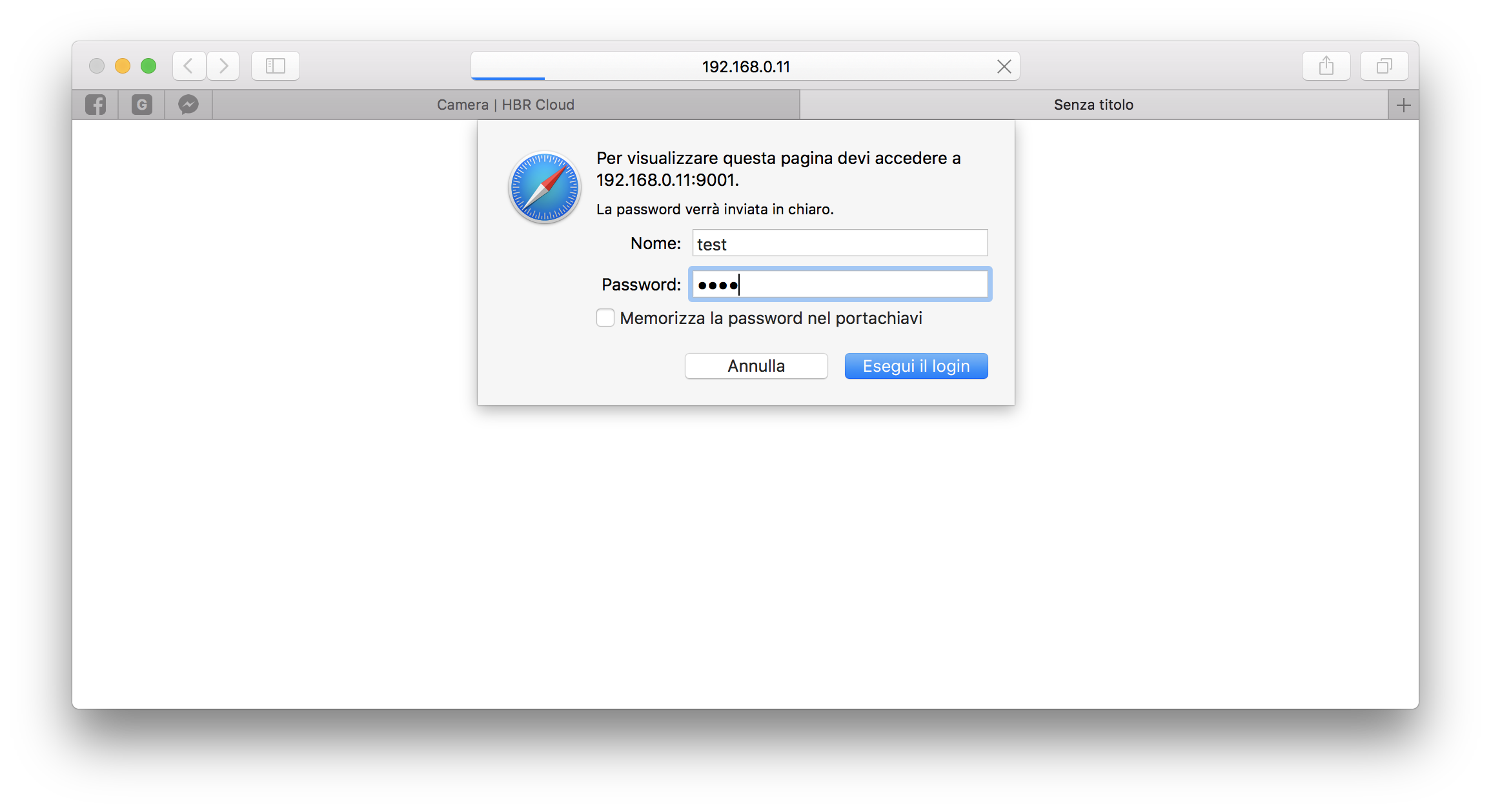
A questo punto, dobbiamo premere sul bottone Apri Manager Robot, che aprirà una nuova schermata chiedendovi di inserire Nome e Password. Inserite i seguenti campi:
- nome: test
- password: test
Nella schermata aperta, dobbiamo quindi abilitare il nodo ros-camera, cliccando sul pulsante start ad esso rifertio.
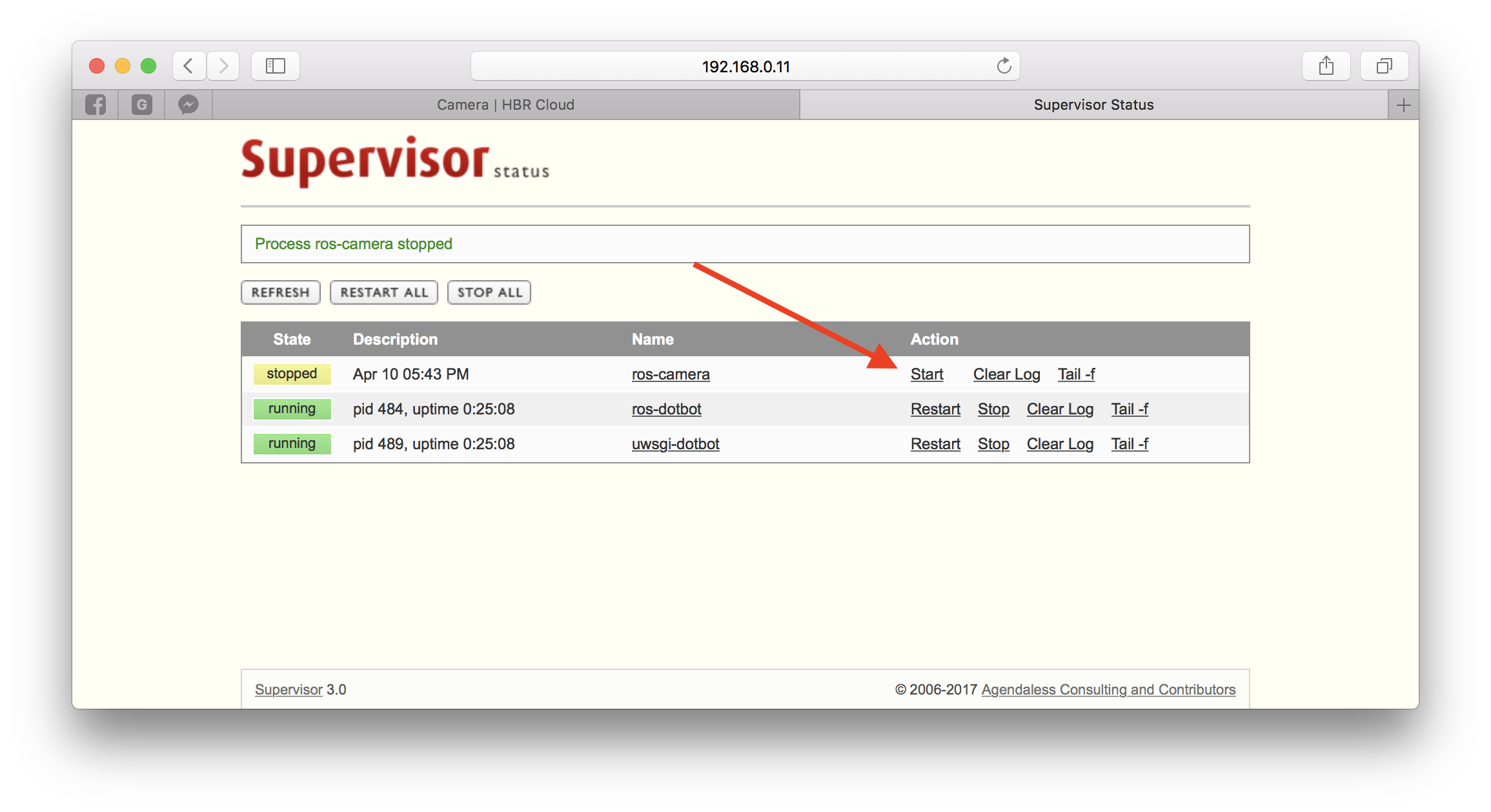
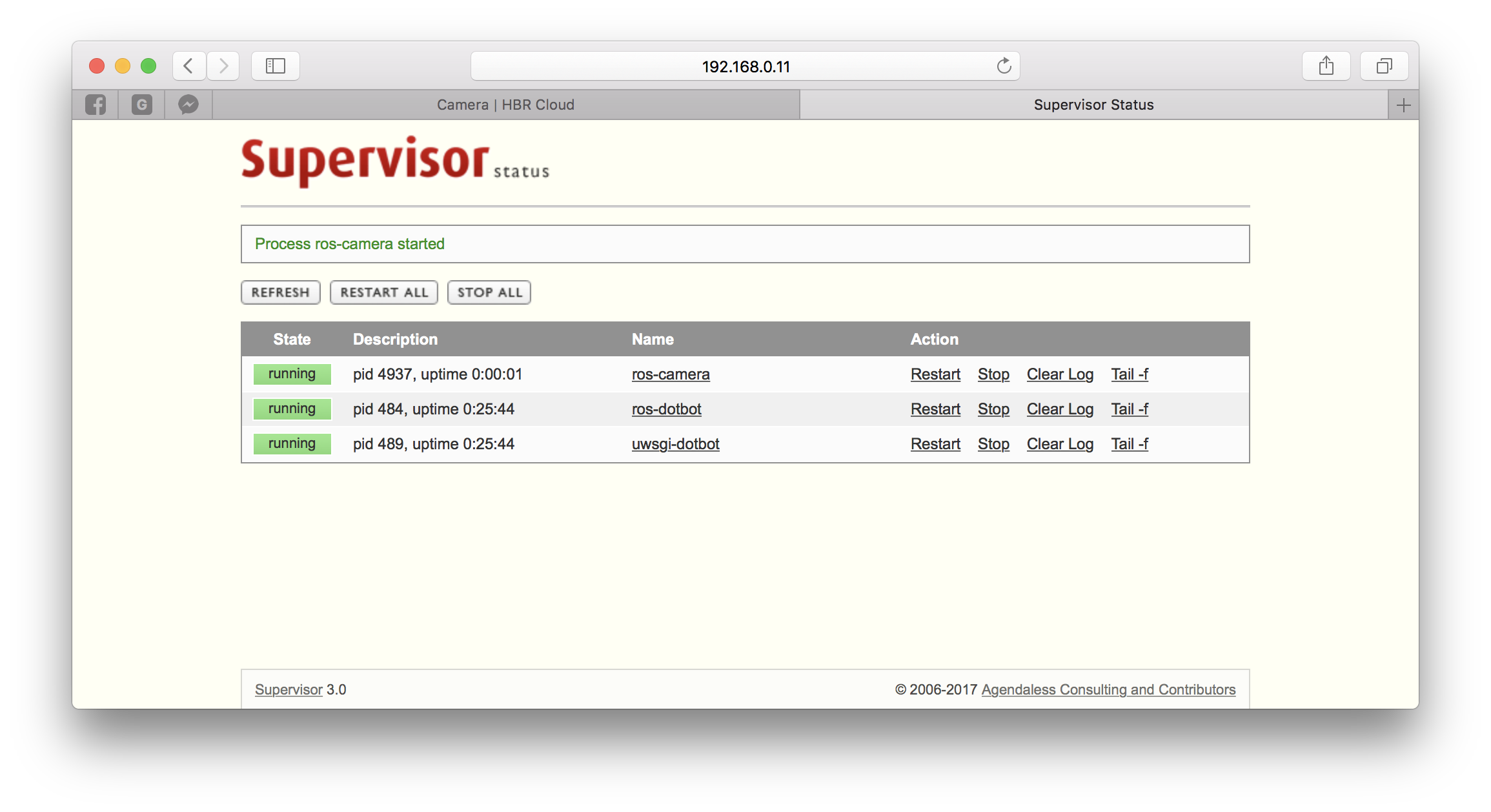
Una volta premuto il pulsante, vedrete che lo stato del nodo diventerà running.
Far partire lo streaming
Anche se il nodo è in running, non è ancora possibile vedere la camera, perchè questa aspetta di essere attivata prima di funzionare. Per farlo, dal manager della camera, premiamo il pulsante start camera.
E se tutto va bene, vedrete apparire streaming video della camera in funzione.
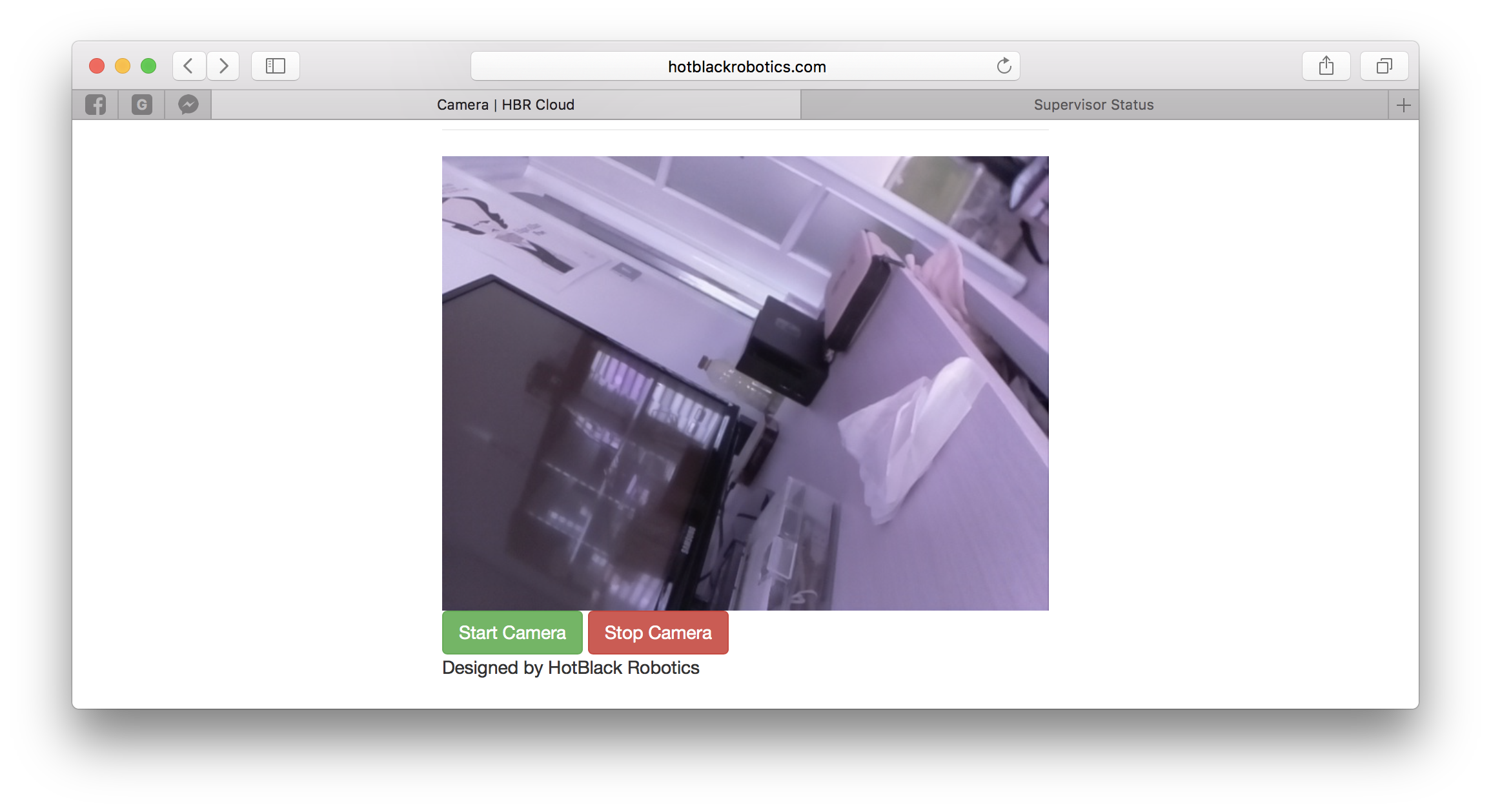
Per stoppare la telecamera, a questo punto, basta premere il pulsante stop camera.
RapiCam da ROS Console
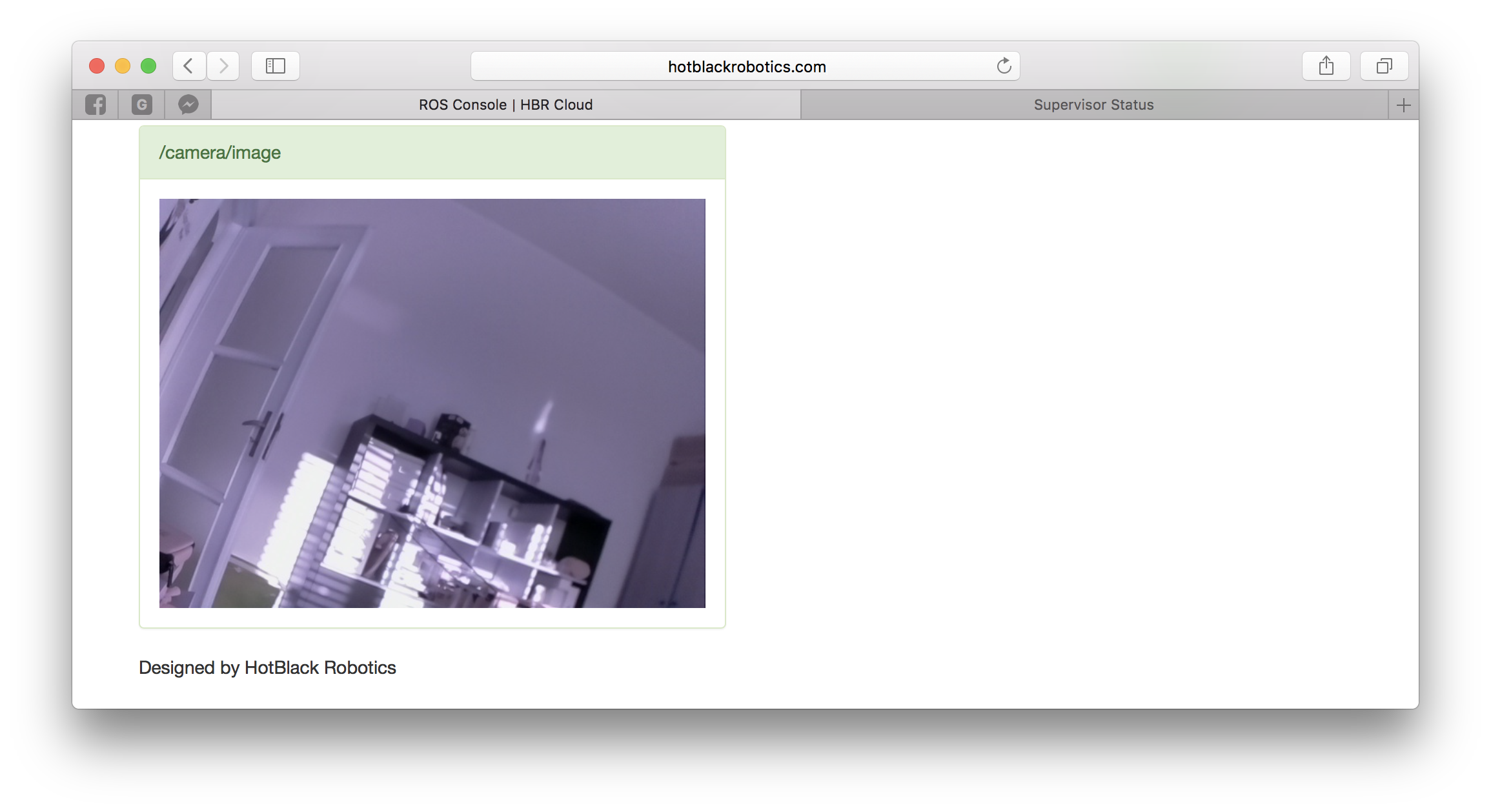
Una volta lanciato il nodo ros-camera e lanciato lo streaming, sarà possibile accedere al topic della telecamera da ROS, e quindi sviluppare applicazioni di Computer Vision.
Lo streaming video della camera sarà anche visibile dalla ROS console, abilitando il topic /camera/image.
Ludus Russo
Un maker, un robotico, un Roker!