Come collegare un robot comprato da Tiger (Spider Robot) in piattaforma cloud !!
Pubblicato il
Gabriele Ermacora
Imprenditore
Qui vi spiegherò come modificare un robot comprato da Tiger e collegarlo in piattaforma! Nel mio caso ho comprato uno Spider Robot per ben 7 Euro!:)

Oltre questo avrete anche bisogno di:
- un power bank per cellulare da 5 Volt io ho usato questo ma potete usare anche un power bank da 9 volt
- un ponte ad H. Io ho usato questo ma anche in questo caso potete scegliere quello che volete. Qualcuno li costruisce anche a mano mettendo insieme 4 transistor!
- un Raspberry PI 3
- cavetti con connettori femmina-femmina
- fascette da idraulico
- un pezzo di cartone ;)
- un cavetto USB a microUSB da cellulare Android.
E otterrete SpiderBot in cloud!
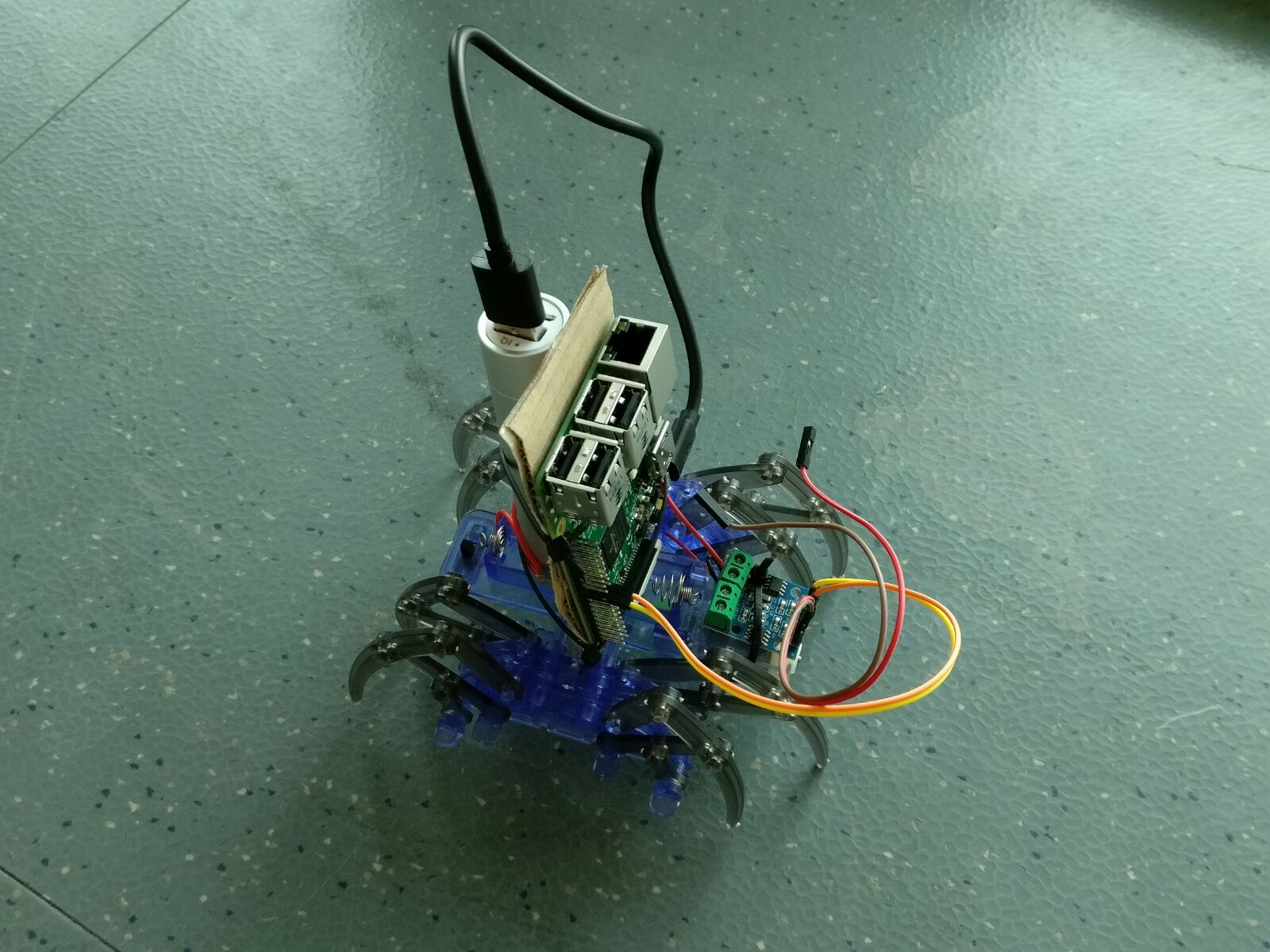
Una volta montato lo Spider Bot come dalle istruzioni di Tiger, prendete un pezzo di materiale rigido (io ho usato un cartone) e ne ritagliate un rettangolo per farci stare il Raspberry. Poi tagliate la parte inferiore in modo da creare una linguetta centrale che andrete a far passare dentro l’appiglio di plastica del robot. Lo ripiegate dentro e lo fissate, io ho usato una spillatrice.
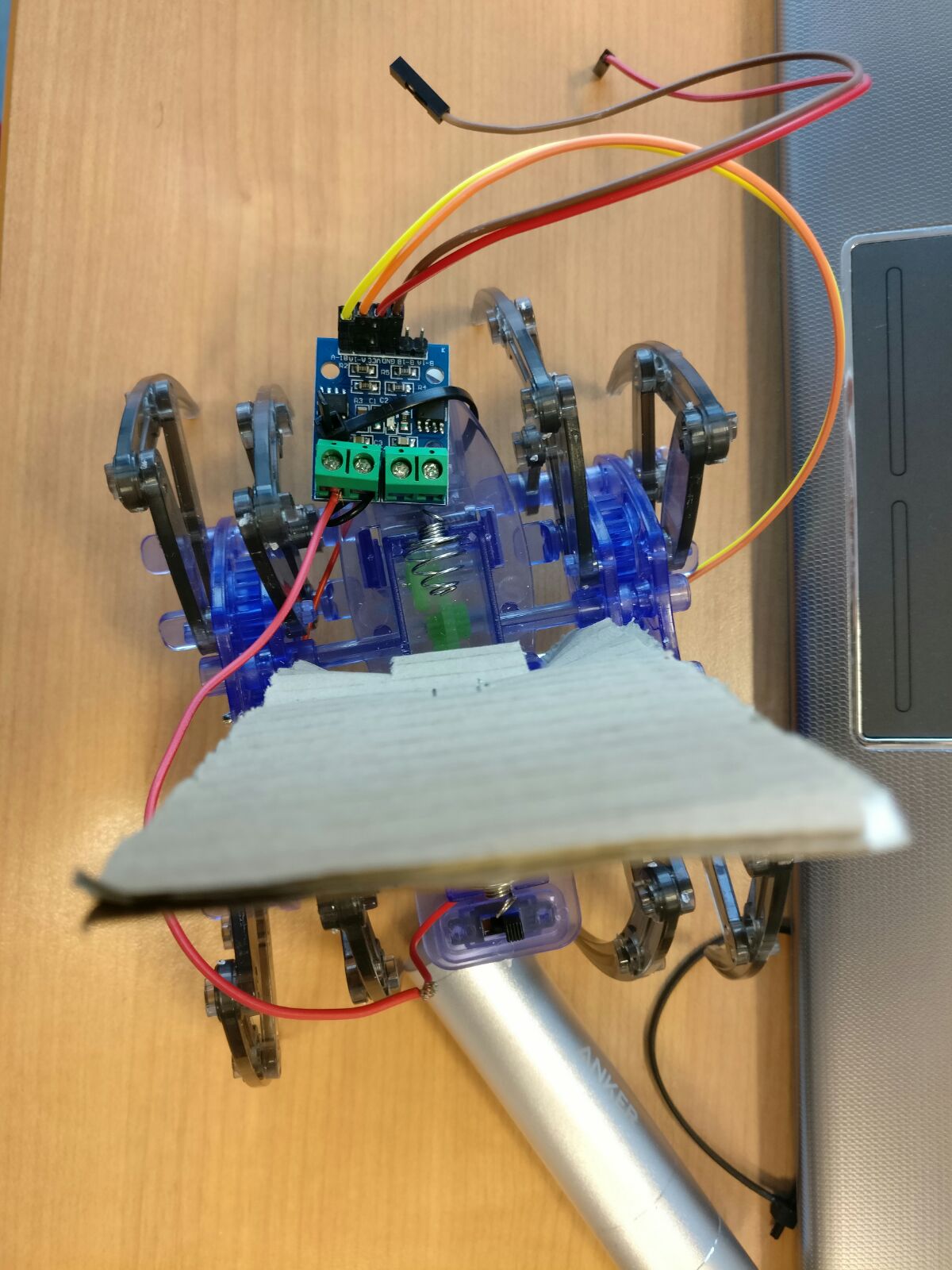
Poi come si vede in figura fissate il ponte ad H (hg7881) con una fascetta sul davanti del robot.
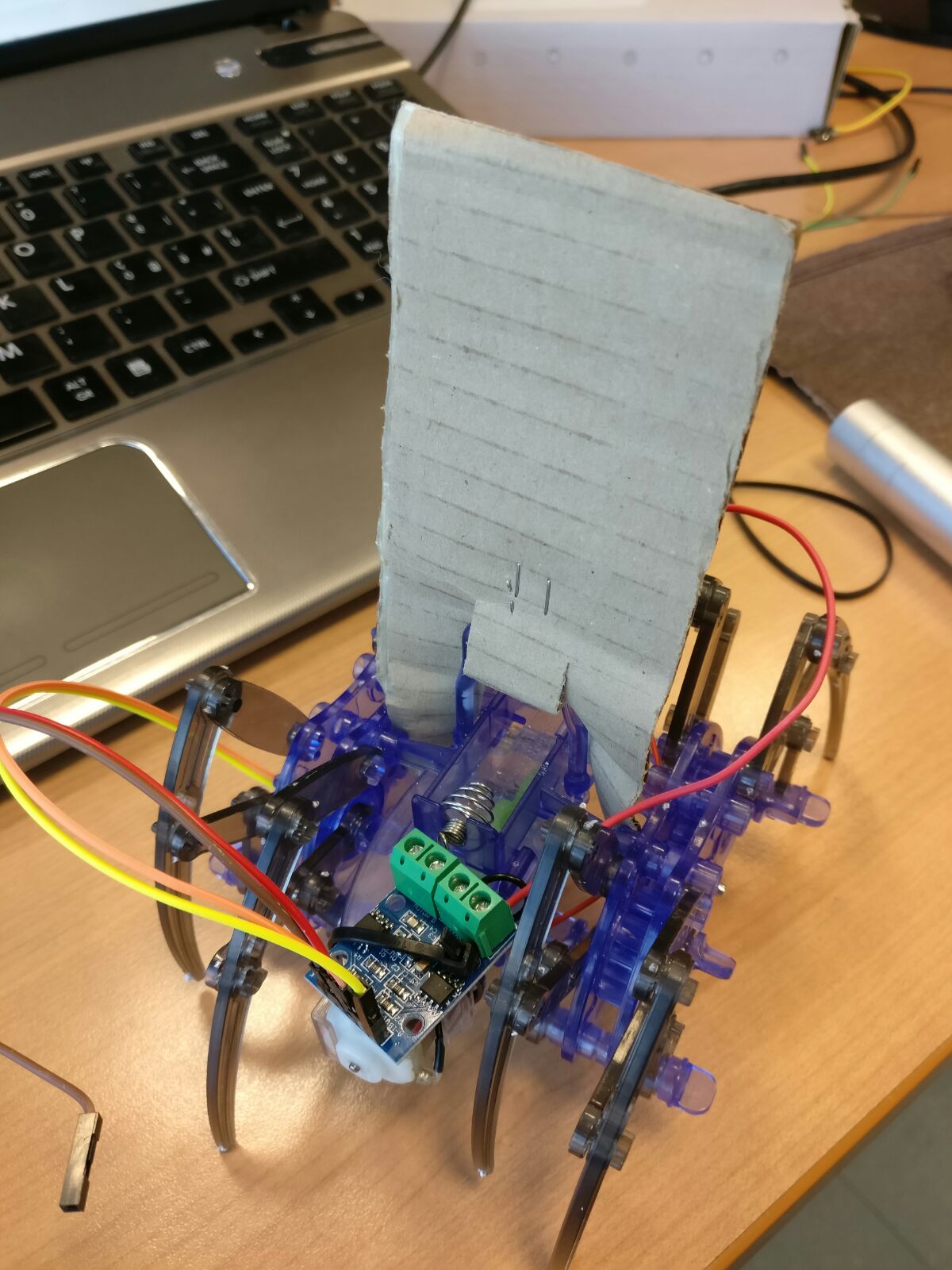
Effettuate i collegamenti. Il filo rosso (+) lo inserite nel mammut del Motor A di destra nel ponte ad H e il nero (terra) nel mammut di sinistra. Con un cacciavite chiudete i mammut per far bene contatto. A questo punto prendete dei cavetti femmina-femmina e, due di questi (il mio rosso e marrone) li usate come alimentazione del ponte ad H e altri due li mettete nei pin di controllo del Motor A.
Scaricate l’immagine per il Raspberry da qui e copiate sull’SD del Raspberry. Configurate il Raspberry che si possa connettere in cloud come nei tutorial precedenti. Ora montate con delle fascette il Raspberry sul supporto verticale insieme alla batteria!
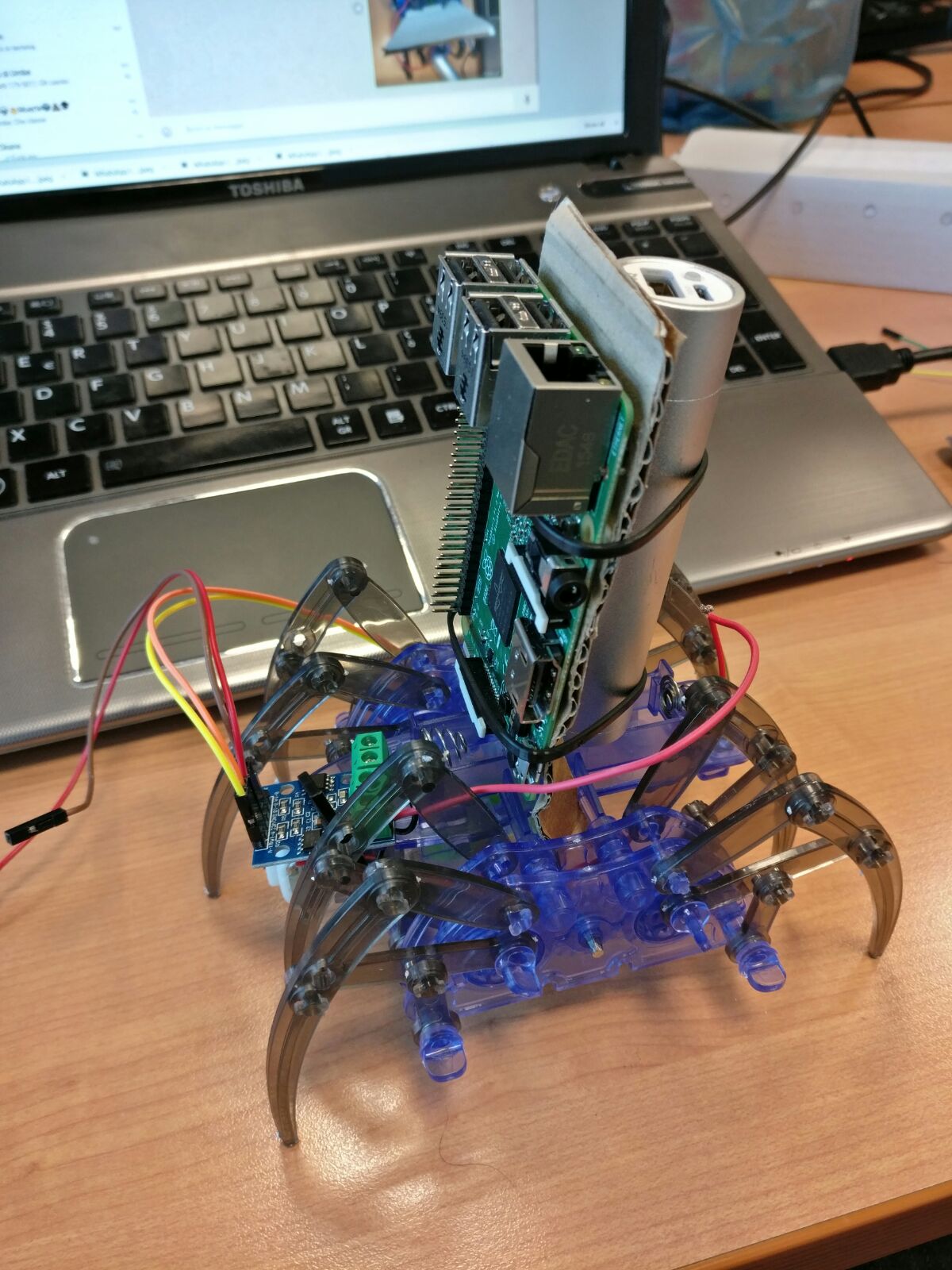
Ora facciamo i collegamenti. Secondo questo scema dei pin del raspberry collegate i due cavetti di alimentazione del ponte H ai pin 4 (+ 5V) e 6 (ground). Poi collegate i pin di controllo del motore ai pin 21 e 22. A questo punto basterà collegare il cavo USB-microUSB al Raspberry e funzionerà!
.png)
Per farlo muovere collegatevi in piattaforma e usate l’app Test Hardware. Impostate il valore 100, 100 sui motori (anche se di fatto ne controllate solo uno) e premete set motor. Vedrete che lo spider bot inizierà a muoversi! Ovviamente mettendo valori diversi si muoverà più o meno veloce e cambiando segno al valore impostato si muoverà al contrario. Prossimo tutorial con due Spiderbot costruiremo uno Spider Bot in grado di andare avanti, indietro e pure girare!
Per informazioni info@hotblackrobotics.com Per la licenza da beta tester gratis registratevi qui.
Gabriele Ermacora
Imprenditore